Temperatursensor für künstliche Haut
Die Fähigkeit, Temperaturänderungen wahrzunehmen, ist eine wichtige Funktion der menschlichen Haut. Forschende an der ETH Zürich haben einen hochempfindlichen und zugleich flexiblen Temperatursensor entwickelt, der demnächst in Prothesen und Roboterarmen Verwendung finden könnte.
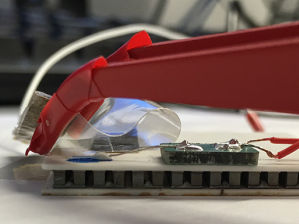
Die biegsame Sensorfolie (transparent) kann die Temperatur einer Wärmeplatte (weiss) messen. In Rot eine kleine Greifzange.
Raffaele Di Giacomo / ETH Zürich
Klapperschlangen und Grubenottern sind bekannt dafür, dass sie ihre Beute auch in völliger Dunkelheit sicher orten können. Das hochsensible Grubenorgan zwischen Auge und Nase erlaubt es ihnen, den warmen Körper eines Säugetiers noch aus einem Meter Entfernung wahrzunehmen. Die genaue Funktionsweise dieser Temperatursensoren wurde erst vor wenigen Jahren entschlüsselt.
Wissenschaftlern um Chiara Daraio vom Department Maschinenbau und Verfahrenstechnik an der ETH Zürich ist es nun gelungen, einen auf natürlichen Substanzen basierenden künstlichen Temperatursensor herzustellen, der ähnlich empfindlich ist und dank seiner Biegsamkeit und anderer nützlicher Eigenschaften schon bald als Bestandteil von künstlicher Haut in Prothesen oder Roboterarmen zum Einsatz kommen könnte.
Entdeckung durch «Cyber-Holz»
Seine Entdeckung verdankt dieser Temperatursensor einem glücklichen Zufall. Raffaele Di Giacomo, der das Projekt im Labor der ETH-Professorin Daraio leitete, war im Rahmen seiner Forschung zunächst auf eine Besonderheit des pflanzlichen Materials Pektin gestossen. Aus dem Alltag ist Pektin eher als Geliermittel für Puddings oder Konfitüren bekannt, doch Di Giacomo interessierte sich für eine andere Eigenschaft dieser aus vielen aneinandergereihten Zuckermolekülen bestehenden Substanz.
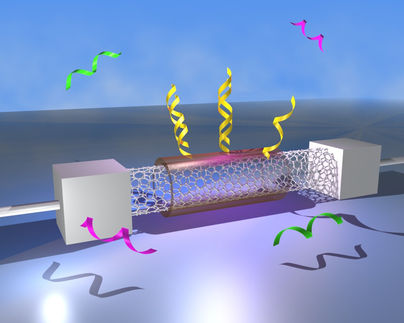
Experimente an den Ästen von Bäumen, deren Zellwände Pektin enthalten, hatten nämlich ergeben, dass deren elektrische Leitfähigkeit stark von der Temperatur abhängt. Um den dafür verantwortlichen Mechanismus zu erforschen, stellten die Zürcher Forscher ein künstliches «Cyber-Holz» aus Pektin und Kohlenstoff-Nanoröhrchen her.
Durch Messungen des elektrischen Widerstands bei verschiedenen Temperaturen fanden sie schliesslich heraus, dass Kalziumionen, die an den Kontaktstellen zwischen zwei Zuckermolekülen des Pektins gefangen waren, für den Sensor-Mechanismus verantwortlich waren. Je höher die Temperatur, desto mehr freie Kalziumionen befanden sich im künstlichen Holz, und desto besser leitete es elektrischen Strom.
Dünner Pektin-Film
«Damit hatten wir zwar ein ideales Material für einen hochempfindlichen Temperatursensor gefunden», erinnert sich Di Giacomo, «doch es war starr wie Holz und damit zum Einsatz in einer künstlichen Haut denkbar ungeeignet». Der Durchbruch kam, als er gemeinsam mit dem Doktoranden Luca Bonanomi statt des künstlichen Holzes einen nur 100 Mikrometer dünnen Film aus simplem, mit Kalziumlösung versetztem Pektin-Gelee herstellte.
An zwei Enden des Films brachten die Forscher Elektroden an, mit denen sie die Leitfähigkeit messen konnten. Das Ergebnis: Auch dieser einfache Pektin-Film leitete elektrischen Strom umso besser, je wärmer er war. Zudem war er hauchdünn, durchsichtig und fast beliebig bieg- und verformbar.
Empfindlich wie eine Schlange
Genauere Messungen ergaben, dass die ETH-Wissenschaftler damit einen Temperatursensor gefunden hatten, der sich sogar mit dem hochempfindlichen Grubenorgan von Schlangen messen kann. Von 10 bis 50 Grad Celsius kann der Pektin-Film Temperaturen mit einer Genauigkeit von einem Hundertstel Grad messen. Das ist vergleichbar mit der Empfindlichkeit des Grubenorgans und doppelt so empfindlich wie die menschliche Haut.
«Ausserdem», fügt Di Giacomo hinzu, «ist unser Pektin-Film extrem leicht herzustellen und enthält keine Transistoren oder anderen elektronischen Bauteile. Dadurch ist er deutlich robuster und weniger störanfällig als herkömmliche flexible Temperatursensoren.»
Räumliche Auflösung
Um für Anwendungen in Prothesen geeignet zu sein, muss der Pektin-Film auch dann noch funktionieren, wenn er nicht flach aufliegt, sondern stark verbogen wird. Den Test dazu bestand der temperaturempfindliche Film mühelos. Zudem sollte es möglich sein, eine örtlich begrenzte Temperaturveränderung in einem grossflächigen Film zu lokalisieren – ähnlich, wie die menschliche Haut einen Hitze- oder Kältereiz räumlich auflösen kann.
Um dies zu prüfen, brachten die Forscher an der Längs- und Querseite eines 25 Quadratzentimeter grossen Films jeweils mehrere Elektroden an, die den Film in ein gedachtes Raster unterteilten. Berührte nun ein menschlicher Finger den Film an einer bestimmten Stelle, so konnten die Wissenschaftler aus der Veränderung der Signale an den verschiedenen Elektroden den Ort der Berührung recht genau bestimmen.
«Derzeit perfektionieren wir noch die Computeralgorithmen, mit denen wir die Signale der Elektroden analysieren», erklärt der ehemalige Masterstudent Vincenzo Costanza, der Mitautor der Studie ist. Zusammen mit einer Verbesserung der elektrischen Kontakte sollte der Temperatursensor dann schon bald bereit sein für einen Praxistest in der Robotik oder Prothetik.
Originalveröffentlichung

Weitere News aus dem Ressort Wissenschaft